1.2.1 三相异步电动机的工作原理
分类:农村电工647字
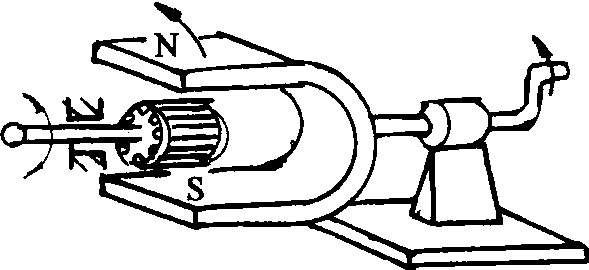
图1-4为三相异步电动机的工作原理示意图。当转动马蹄形磁铁时[图1-4(a)],它的磁力线会切割鼠笼的导体,在导体中产生感应电动势,其电动势的方向可根据右手定则来确定 (鼠笼上半部导体的电动势的方向朝里,用符号⊗表示, 下半部导体的电动势方向朝外, 用符号⊙表示), 见图1-4 (b)。由于鼠笼导体是短路的,因此在电动势作用下导体中会有电流通过,其电流方向与电动势方向相同。由于带电导体中的电流在磁场中要受力的作用,可用左手定则来确定力 (F) 的方向。鼠笼式电动机的上半部与下半部所受力的大小相等,而方向相反,因此而形成转矩,也就是这个转矩使鼠笼顺着磁场的转动方向转 ...... (共647字) [阅读本文]>>
 上一篇
上一篇