2.4.2 异步电动机的能量再生与制动
分类:PWM模式与电力电子变换12327字
1. 异步电动机的能量再生[57]
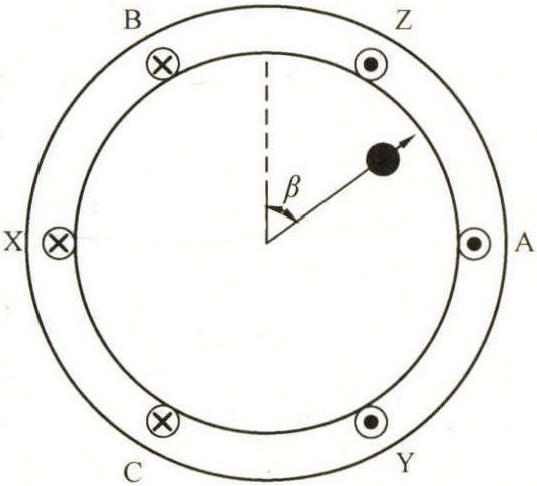
异步电动机在减速运行过程中或在位能作用下运行时,都将发生能量再生。先假定三相异步电动机定子绕组中通以三相电流, 极性为İ1A>0、 İ1B<0、İ1C<0 (下标: “1”表示定子,“2”表示转子,字母上加点表示相量),该电流将在电动机气隙内形成按正弦规律分布,并以同步转速旋转的磁动势F1, 如图2-79所示。 F1先建立气隙主磁场Bm (m),Bm是个旋转磁场。当变频器驱动异步电动机减速运行时,旋转磁场同步转速n0总是先于转子转速n下降, 即n0<n, 如图2-80所示。磁通m切割定、 转子绕组, 并在定、 转子绕组内感应出定子电动势Ė1A、Ė1B、 Ė1C和转子电动势Ė2a、Ė2b ...... (共12327字) [阅读本文]>>
 上一篇
上一篇




 扫一扫微信支付
扫一扫微信支付