刚性运动物体空间形态的确定方法
分类:超高索塔施工与控制447字
3.4.1.1 平动刚体
如图3-5所示,只要知道任意时刻参考点(Ref.)的坐标,即可得到Pi(i=1,2,3,4)的坐标。Δ_x=x′0—x0; Δ_y=y′0—y0;则:x′i=xi+Δx ,其中:i=1,2,3,4,…;y′i=yi+Δy ,其中:i=1,2,3,4,…。
图3-5 平动状态下的运动物体
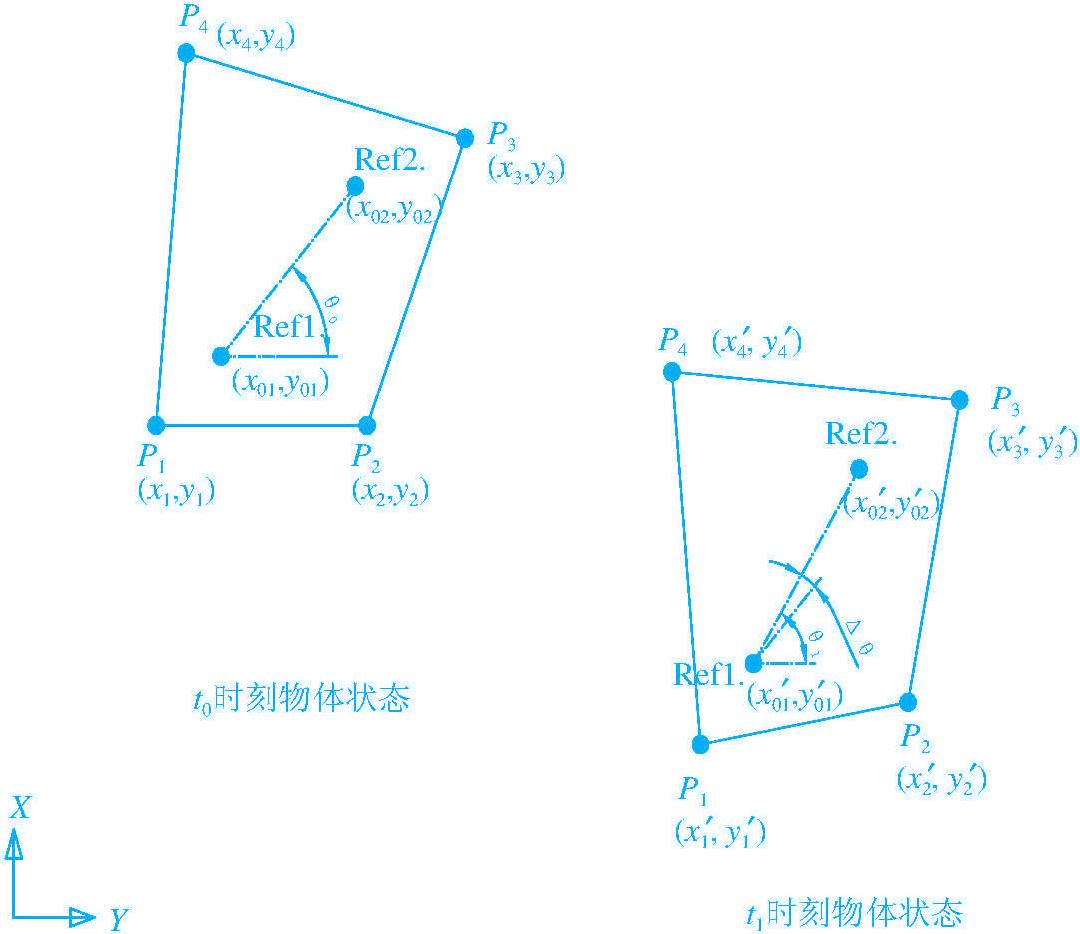
3.4.1.2 平动、转动刚体
要同时获得转动、平动状态下的物体形态坐标(图3-6),需要设置两个参考点(Ref1.、Ref2.)。
已知t0时刻和t时刻参考点坐标,通过坐标变化,即可获得物体形态控制点的坐标:
图3-6 平动、转动状态的运动物体
在刚性运动物体任意运动时刻t,只要测量物体上的参考点,就能快速获得物体在空间的形状。基于这一理念提出的索塔施工控制方法将被用来实现 ...... (共447字) [阅读本文]>>
 上一篇
上一篇