第三节 现场小运机器人
分类:输配电线路施工技术737字
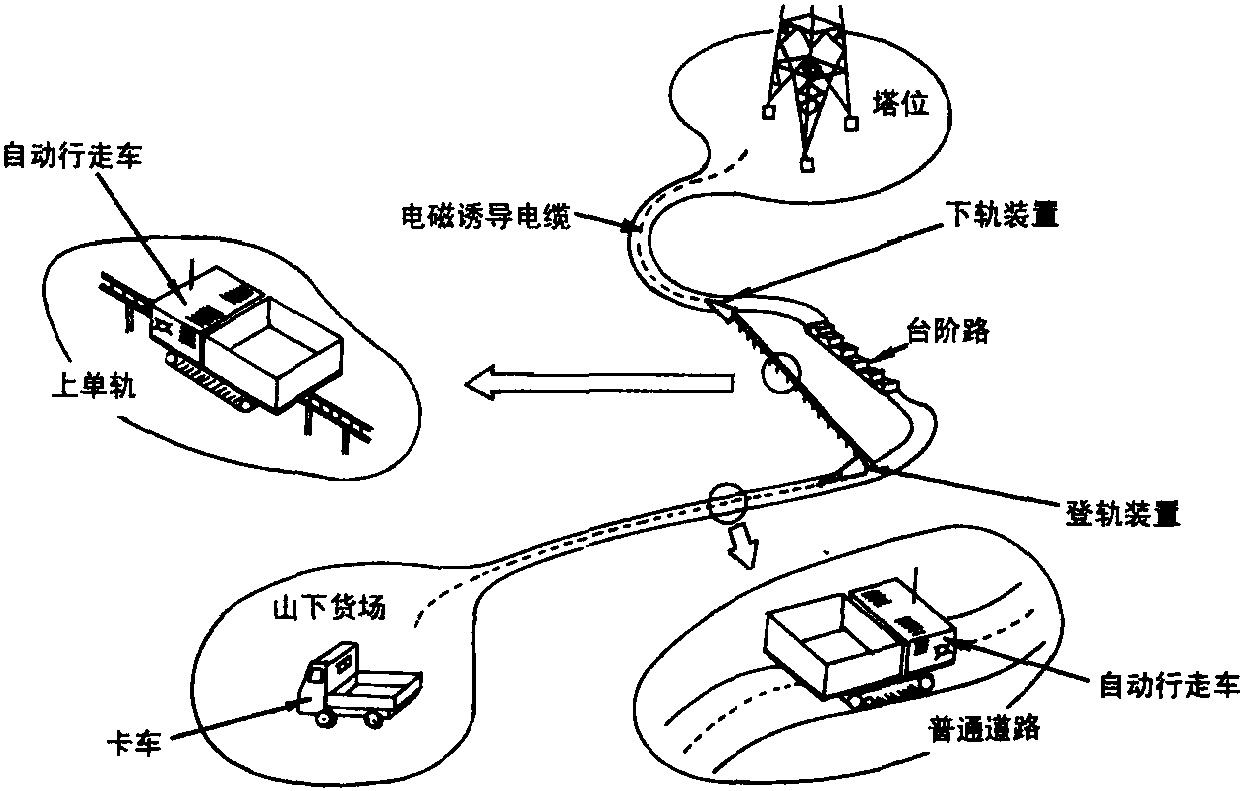
图1-2-3-1 现场小运机器人整套装置
山区器材运输在日本等工业发达国家已成为施工的难题: 由于线路施工的机械化程度高,有大量的机械和器材需要小运(离塔位100~300m),若用直升飞机或索道则明显不合理,而用人力或畜力搬运亦难以实现。日本关西电力公司曾研制一种“现场小运机器人”,试图由其承担现场小运的工作。
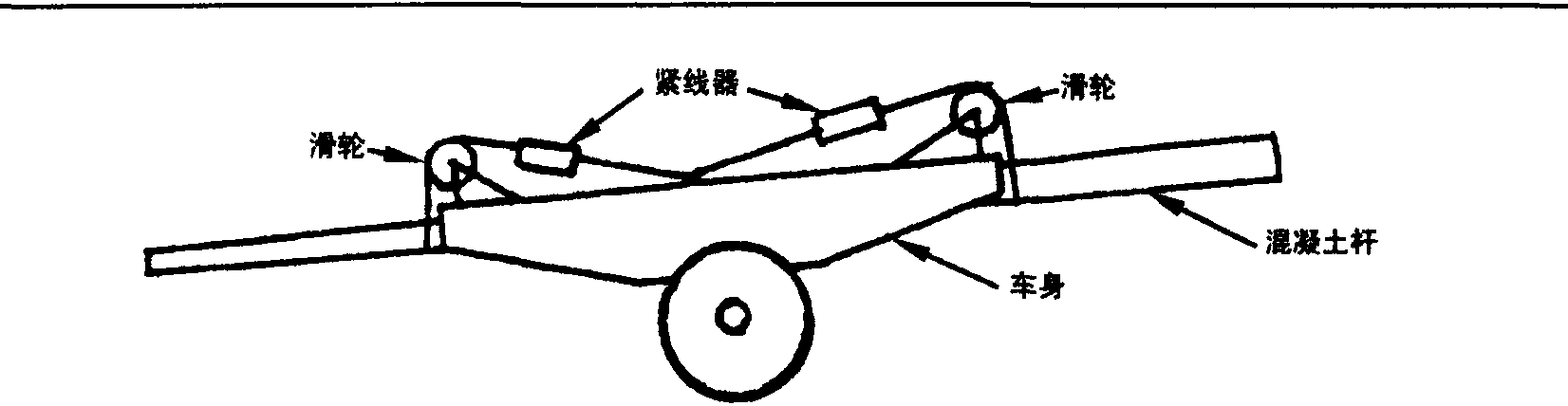
图1-2-3-2 现场小运机器人主要部件
现场小运机器人的整套装置如图1-2-3-1所示,由自动行走车、单轨、登轨(下轨)引导装置、电磁诱导电缆等组成。
首先在普通道路的中央敷设电磁诱导电缆,在无普通道路段设置单轨车的轨道,在普通道路和单轨车道的衔接处设置登轨(下轨)引导装置 ...... (共737字) [阅读本文]>>
 上一篇
上一篇